
Hallo liebe Kolleg(inn)en,
ich stelle meinen Beitrag mal hier ein, weil's sich um modernes Digital-"Teufelszeug" handelt, auch wenn es auf alte Loks - vorzugsweise großer Spuren - angewendet werden kann. Zitat der Unterüberschrift dieser Forumsrubrik:
Zitat
hier kommt alles rein was mit der digitalen Modellbahn zu tun hat
1. Zusammenfassung:
Vorwarnung: Dröger, langer Text und wenige, langweilige Bilder! 
Alte Loks großer Spuren mit Reihenschlussmotor lassen sich zwar digitalisieren, jedoch bleibt der Versuch unbefriedigend, eine akzeptable Lastregelung einzustellen. Im Bereich niedriger Motordrehzahlen wirkt sich die Lastregelung unbefriedigend aus. Das Fahrverhalten ist in diesem Bereich schlecht.
Mit Hilfe eines kleinen zusätzlichen Kondensators ist es mir nun gelungen, insges. 6 Spur0-Loks zu digitalisieren und auch unter Lastregelung ein sehr gutes Langsamfahrverhalten zu erzielen.
2. Das Problem:
Besitzer von Loks mit Permanentmagnet-Motor oder der Möglichkeit zum Hamo-Umbau haben's gut. Mit praktisch jedem Digitaldecoder aus dem Ladenregal ist eine Digitalisierung mit Lastregelung möglich. Wer eine H0-Lok mit Reihenschlussmotor lastgeregelt digitalisieren möchte, kann immerhin noch auf den Uhlenbrock 76200 (offenbar baugleich mit Viessmann 5427) zurückgreifen. Wer bislang Loks größerer Spuren mit Reihenschlussmotor unter Lastregelung digitalisieren wollte, hatte das Problem, dass der genannte Uhlenbrock-Decoder schnell überfordert worden wäre.
Nun hatte unser Forumsmitglied Nostalgiker kürzlich in dem Thread Alte Loks Lastgeregelt digitalisieren die vortreffliche Idee vorgestellt, die Statorspule mit einem Schaltregler zu versorgen und damit auch wieder Zugriff auf eine große Zahl geeigneter Decoder zu haben. Das funktioniert offenbar sehr gut und ist eine echte Alternative zu allem, was ich in meinem weiteren Text darstellen werde. - Wer schlau ist, liest also spätestens jetzt nicht mehr weiter und holt sich lieber ein Bier  .
.
Forumsmitglied SAH hatte dann in einem Folgebeitrag dazu geäußert:
Zitat von SAH im Beitrag RE: Alte Loks geregelt digitalisierenund dabei auf diese von ihm erstellte pdf-Datei verwiesen.
für die Märklinloks gibt es eine Alternative unter Beibehaltung des ursprünglichen Motors.
Damit jetzt keiner lange suchen muss, gebe ich die dort verwendete Schaltung im folgenden Bild in der linken Hälfte wieder:

Bild 1
Links im Bild sieht man also die von SAH verwendete Lösung für den Fall, dass die Statorspule in der Mitte geteilt ist (wie z.B. bei der alten Märklin-70er-Schaltung). Rechts ist eine Variante für einteilige Statorspulen abgebildet (wie z.B. bei der Märklin-66er-Schaltung).
L1 und L2 (bzw. nur L1) sind darin die Statorspulen. Oben links geht's jeweils zum Kommutator und unten ist der Motorausgang des Decoders angeschlossen.
Die Kondensatoren C1 (und C2) sind selbst im ungeregelten Digitalbetrieb zumeist erforderlich, weil die Statorspulen i.d.R. eine so hohe Induktivität besitzen, dass sie bei den hohen Motoransteuerungs-Frequenzen der Decoder eine zu hohe Vorschaltimpedanz darstellen. Die Dimensionierung dieser Kondensatoren ist für den ungeregelten Betrieb meist nicht kritisch. Schon kleine Elkos genügen.
Um nun eine Lastregelung realisieren zu können, müssen C1 (und C2) deutlich erhöht werden. Sie sollen nun in der Messpause des Decoders das Magnetfeld des Stators aufrecht erhalten, damit der Motor (als Generator weiterlaufend) eine Messgröße für den Decoder zur Verfügung stellen kann - die Voraussetzung für eine Lastregelung.
Wie Forumsmitglied SAH, hatte auch ich vor einigen Jahren mit den o.a. Schaltungen und Lastregelung herumexperimentiert, dabei jedoch unbefriedigende Ergebnisse erzielt und dies in meinem Beitrag #7 im o.a. Thread so beschrieben:
Zitat von t.horstmann im Beitrag RE: Alte Loks geregelt digitalisierenWohlgemerkt war es auch bislang sehr einfach möglich, selbst größere Loks mit Reihenschlussmotor zu digitalisieren, aber die Lastregelung blieb eben unbefriedigend und musste i.d.R. im Decoder ganz deaktiviert werden!
Im lastgeregelten Betrieb der genannten Decoder fand sich nun in keinem Falle eine geeignete Einstellung für die Lastregelparameter. Bei niedriger Motordrehzahl und (oder) sehr geringer Last blieb das Fahrverhalten unbefriedigend.
Eine Idee für die Beseitigung des unbefriedigenden Lastregelverhaltens hatte ich schon lange im Hinterkopf. Die nötigen Tests dazu standen aber ganz unten auf meiner Prioritätenliste. Angestoßen durch den Beitrag des Forumsmitgliedes Nostalgiker hat's mir nun aber keine Ruhe mehr gelassen und ist in der Prioritätenliste ganz nach oben gerutscht. Hier also meine Ergebnisse.
3. Die Lösung:
Es ist nur ein einziges weiteres Bauteil erforderlich:

Bild 2
Wohlgemerkt: Es ist nicht die 1-Euro-Münze sondern der kleine "Krümel" daneben (und der kostet gerade mal etwas mehr als die Hälfte dieses Euros). Die nur minimal geänderten Schaltungen sehen jetzt so aus:

Bild 3
Neu ist also nur der mit "Cx" bezeichnete Kondensator.
4. Die Erklärung:
Wer sich für den technischen Hintergrund nicht interessiert, kann diesen Abschnitt überspringen. Für alle (also wohl niemand) anderen:
Im lastgeregelten Digitalbetrieb sind 2 Betriebsmodi zu unterscheiden. Im motorischen Betreib erfüllt der Motor seinen eigentlichen Zweck, er treibt das Fahrzeug an. Im generatorischen Betrieb liefert er in der Messpause eine Mess-Spannung bzw. einen Mess-Strom an den Decoder zurück.
Schauen wir uns einmal den linken Teil von Bild 1 (ersatzweise auch Bild 3) an und nehmen an, dass die Fahrtrichtung gerade so gewählt ist, dass der Strom im motorischen Betrieb durch L1 und D1 fließe. Die vom Decoder an den Motor abgegebene Spannung setzt sich nun so zusammen:
Spannung am Kommutator plus Spannung über L1 (bzw. C1).
Im generatorischen Betrieb (Messpause) dreht sich nun aber die Stromrichtung um! Stromquelle ist jetzt der Motor, Senke der Decoder. Damit fließt der (zwar nur geringe) Mess-Strom genau in die umgekehrte Richtung. Im Beispiel geht es nun also nicht mehr durch L1 und D1 sondern durch D2 und L2, wobei L2 durch den ungeladenen C2 gebrückt wird. Also lautet die Formel für die an den Decoder zurückgelieferte Spannung jetzt:
Spannung am Kommutator plus Null!
Das "gefällt" dem Decoder natürlich überhaupt nicht, womit er sich dauernd zum Nachregeln genötigt sieht. - Ein "wunderschöner" systematischer Fehler! (Ein Wissenschaftler riebe sich jetzt vor lauter Entzücken über diesen Fehler die Hände
 .)
.)In der Schaltung im rechten Teil von Bild 1 (ersatzweise auch Bild 3) wird's durch die Stromrichtungsumkehr sogar noch schlimmer. Hier lauten die Spannungen:
Spannung am Kommutator plus Spannung über L1 (bzw. C1) im motorischen Betrieb und
Spannung am Kommutator minus Spannung über L1 (bzw. C1) im generatorischen Betrieb.
Um das geschilderte Problem zu beseitigen, dient der in Bild 3 eingefügte bipolare(!) Kondensator Cx während der Stromrichtungsumkehr in der Messpause nun dazu, den Beitrag von L1 (bzw. C1) für das Messergebnis korrekt aufrecht zu erhalten. - Damit ist die systematische Verfälschung des Messergebnisses aufgehoben, die Lastregelung funktioniert endlich wie gewünscht!
5. Benötigte Bauteile:
Vorab sei folgendes bemerkt: Der Schaltung auf der rechten Seite von Bild 3 ist jetzt grundsätzlich der Vorzug zu geben. Selbst zweiteilige Statorspulen sollten wie einteilige gehandhabt werden, indem ihr mittlerer Anschluss stillgelegt und isoliert wird. Die damit zu erzielende Verdopplung der Windungszahl verstärkt das Magnetfeld des Stators maßgeblich. Im Resultat wird der Motor bei gleicher Leistungsaufnahme leistungsfähiger und die erzielbare Maximalleistung wird ebenfalls höher! Im Folgenden setzte ich mich also nur noch mit der Schaltung in Bild 3 rechts auseinander!
Kondensator C1:
Damit das Magnetfeld des Stators während der Messpause hinreichend erhalten bleibt, wird ein Elko von 2200µF benötigt. Das reicht für Statorspulen bis herab zu etwa 3 Ohm Gleichstromwiderstand bei den meisten Decodern aus. Unter 3 Ohm sollten es 4700µF sein und unter 1,5 Ohm 10000µF. Falls einzelne Decodertypen extrem lange Messpausen einlegen, mag das jedoch u.U. jeweils doch nicht ausreichend sein. Die Spannungsfestigkeit sollte 10-16V betragen. Ideal wären 25V, weil dann notfalls die volle Digitalspannung vertragen würde. (Bitte beachten: Die meisten digitalen Multimeter liefern bei Widerstandsmessungen an Spulen falsche Ergebnisse, weil sie den Widerstand nicht mit Gleichspannung bzw. -strom messen!)
Dioden D1-D4:
Wegen Cx werden nunmehr keine schnellen Dioden mehr benötigt. Es genügen "langsame" Standarddioden. Im Normalfall kann also ein fertig aufgebauter Brückengleichrichter verwendet werden. Die Belastbarkeit sollte 1A sein. Bei Statorspulen unter 3 Ohm sollte man 3A nehmen. Die jeweiligen Anschlusssymbole des Brückengleichrichters habe ich im Bild 3 rechts mit eingezeichnet. Wer die Brücke aus einzelnen Dioden aufbauen möchte, kann Dioden vom Typ 1N400x (x = 1 ... 7) bzw. 1N540x (x = 0 ... 8) verwenden.
Kondensator Cx:
Die Dimensionierung ist hier schwierig, weil der fließende Mess-Strom nicht bekannt ist. Nach meinen (noch geringen) Erfahrungen könnte bereits ein Folienkondensator mit 1µF ausreichend sein. Die Ergebnisse mit dem weiter unten beschriebenen ESU-Lokpilot-XL-V3.0 haben mir jedoch gezeigt, dass es sinnvoll ist, lieber deutlich mehr zu nehmen. Folienkondensatoren werden dann meist sehr sperrig. Es gibt jedoch winzige SMD-Keramikkondensatoren mit extrem hohen Kapazitätswerten, so dass sogar 22µF problemlos realisierbar sind. Die Spannungsfestigkeit von Cx sollte wie bei den Elkos 10-16V, am besten 25V sein. (Der in Bild 1 neben der 1-Euro-Münze abgebildete Kondensator ist ein keramischer SMD-Kondensator mit 22µF und einer Spannungsfestigkeit von 25V!)
Kurze Zwischenumfrage: Gibt's hier überhaupt noch irgendeinen einzigen Leser??? - Außer Admins, die müssen ja!

Digitaldecoder:
Es sollte jetzt so gut wie jeder lastgeregelte Decoder geeignet sein, der einen für den jeweiligen Motor ausreichenden Strom zur Verfügung stellen kann.
6. Einige praktische Tips zum Umbau:
a) Bis hierhin hört sich das vielleicht alles sehr kompliziert und aufwendig an. Das ist aber gar nicht so! Wenn man sich Bild 3 rechts noch einmal anschaut, benötigt man neben dem Decoder nämlich nur 3 weitere Bauteile: den Elko, die (vorgefertigte) Gleichrichterbrücke und den SMD-Keramikkondensator Cx. Keine Angst vor diesem Teil! Man muss jetzt nämlich keine Platine herstellen, um diesen Kondensator dort auflöten zu können. Das Ding lässt sich auch ganz einfach bedrahten:

Bild 4
Links liegt der gelieferte Kondensator, in der Mitte sind die Drähte angelötet und rechts ist die Anordnung mit Schrumpfschlauch isoliert. Da das Ganze nicht mechanisch belastet werden soll, geht das problemlos. Nun lassen sich die 3 Bauteile auch ohne Platine sehr kompakt zusammenlöten und sollten in den Loks größerer Spuren problemlos ein Plätzchen finden. Zum Befestigen am Fahrwerk können z.B. ein paar Tropfen Epoxydharzkleber am Elko genügen. Die Abwärme produzierende Gleichrichterbrücke sollte dabei frei von Luft umgeben bleiben.
b) Im Originalzustand haben die alten Reihenschlussmotoren praktisch immer irgendwo eine elektrische Verbindung zum Lokgehäuse. Diese Verbindung muss vor dem Decodereinbau zwingend unterbrochen werden. Anderenfalls wird der Decoder zerstört!
Im Falle der Märklin-70er-Schaltung ist einer der beiden Bürstenhalter (Bitte keine der aktuellen Sexismus-Debatten sondern das "r" beachten!) mit dem Lokgehäuse verbunden. Für die Isolierung wird hier eine geeignete Isolierscheibe benötigt. Man kann sich da selbst etwas aus dünnem Kunststoff o.ä. zurechtschneiden. Ich nehme dafür Dichtungen aus harzgetränkter Pappe, wie sie sich in Dichtungs-Nachkaufsets für alte Dampfmaschinen finden. Die flachste dieser Dichtungen mit geeignetem Innendurchmesser ist dann die richtige.
Im Falle der Märklin-66er-Schaltung wird die Verbindung des Motors zum Lokgehäuse durch den Umschalter hergestellt. Hier genügt es nun, einen dünnen Kunststoffstreifen unter die Kontakte des Umschalters zu schieben. Man sollte nur noch den Bedienhebel aus der Lok ausbauen, damit der Kunststoffstreifen nicht durch versehentliche Betätigungen des Umschalters wieder herausgedrückt wird.
c) Für die ersten Tests nach einem Umbau genügen bereits die herstellerseitigen Einstellungen des Decoders. Man sollte nur wissen, dass der Motor aufgrund des Reihenschlusses eine sehr hohe Anlaufspannung hat. Damit liegt ein größerer unterer Fahrstufenbereich zunächst brach. Man muss also den Fahrregler rel. weit aufdrehen, bevor die Lok losläuft. Das lässt sich aber später optimieren (s.u.).
7. Erste eigene Erfahrungen:
Für meine ersten Tests konnte ich nur auf Decoder zurückgreifen, die ich noch liegen hatte. Sie werden größtenteils nicht mehr hergestellt.
a) Tran DCX80-2
Der Decoder versteht nur das Digitalprotokoll DCC. Ich benutze jedoch auch nur DCC. Das Fahrverhalten der Märklin-Lok GR 70-12920 sowie einer Replicalok ist auf Anhieb sehr befriedigend. Im sehr niedrigen Drehzahlbereich tackern die Motoren jedoch etwas vorlaut. Eine Erniedrigung des Wertes in CV51 (sog. "P"-Anteil der Regelung) hat hier ein sehr gutes Ergebnis gebracht. Weitere Veränderungen waren nicht erforderlich. Die Loks haben jetzt ein sehr gutes Fahrverhalten, gerade auch im Bereich extrem niedriger Drehzahlen.
Die Anfahrspannung in CV2 war problemlos auf einen solchen Wert hochsetzbar, dass der Motor auf niedrigster Fahrstufe gerade noch weiterläuft. Aufgrund des etwas höher liegenden Losbrechmomentes dieser alten Motoren, laufen sie erst auf einer Fahrstufe minimal darüber sicher an. Das lässt sich nicht abstellen, ist aber auch nicht weiter störend.
Die genauen CV-Werte dürften wahrscheinlich niemanden interessieren, weil wohl sonst niemand mehr diesen recht seltenen Decoder liegen hat. Er wird nicht mehr hergestellt.
b) ESU Lokpilot XL V3.0
Auch dieser Decoder wird inzw. nicht mehr hergestellt. Es gibt die 4er-Serie als Nachfolger. Da ich mir aber vorstellen kann, dass die ermittelten Werte auf die "kleineren" ESU-Decoder der 3er-Serie übertragbar sind, könnten die gefundenen CV-Werte evtl. noch von Interesse sein. Ich habe zwei Replicaloks damit digitalisiert. Eine hat einen 66er-, die andere einen 70er-Nachbaumotor der 920er-Größe.
Der ESU-Decoder hat mir zunächst einige Kopschmerzen bereitet. Alles lief anfangs absolut unrund. Die Motordrehzahl schwankte ohne Änderungen am Fahrregler in längeren Perioden und änderte sich urplötzlich ohne äußeren Anlass abrupt.
Ich hatte hier zunächst noch mit Folienkondensatoren von 1µF für Cx herumexperimentiert. Das ist offenbar für diesen Decoder doch noch nicht aureichend und scheint stark temperaturabhängig zu sein. Um hinreichend Sicherheitsabstand zu haben, habe ich daraufhin generell die oben bei den Bauteilen genannten SMD-Keramikkondensatoren mit 22µF verwendet. Seitdem gibt's keinerlei Probleme mehr! Ich kann daher wirklich nur empfehlen, beim Kapazitätswert von Cx nicht zu sparen! Wer käme schon später noch darauf, woran es liegen könnte, wenn eine Lok mit einem zu klein bemessenen Cx auf einmal anfängt zu "spinnen"?
Für die Lastregelparameter dieses Decoders habe ich folgende Einstellungen für ein optimales Fahrverhalten gefunden (beide Loks gleich):
CV54 ("K"-Anteil der Regelung) = 24 (Bei höheren Werten neigen die Motoren zu leichtem Ruckeln.),
CV55 ("I"-Anteil der Regelung) = 60,
CV56 konnte auf Herstellervorgabe belassen werden.
Die Loks laufen mit diesen Einstellungen sehr sauber.
Aber das nächste Problem ließ nicht auf sich warten. Der Versuch, die Anfahrspannung in CV2 anzupassen, blieb absolut unbefriedigend, auch unter Zuhilfenahme von verschiedensten Einstellungen in CV53 (Regelungsreferenz). Die Anfahrspannung ließ sich zwar immer so einstellen, dass die Loks auf niedrigster Fahrstufe gerade noch weiterliefen. Aber die Höchstgeschwindigkeit erreichten die Loks schon ca. auf Fahrstufe 40 (von 128). Damit stand nur 1/3 des Reglerweges zur Verfügung. Meine letzte Hoffnung war nun die alternative Geschwindigkeitskennlinie, die durch 28 Einstellungen im Bereich von CV67-CV94 vorgegeben werden kann. - Ein nerviges Getippe, aber es hat zum Glück funktioniert! Die richtigen Einstellungen finden sich nun recht einfach so:
Zunächst trägt man in CV67 den Wert 64 ein. CV94 erhält den Wert 255. Dazwischen biegt man sich eine Geschwindigkeitskurve hin, wie man sie sich wünscht (im einfachsten Falle linear; durchgebogene Kurven haben aber erhebliche Vorteile im Rangierverhalten). Jetzt ist nur noch CV53 so einzustellen, dass die jeweilige Lok wieder auf der niedrigsten Fahrstufe gerade noch weiterläuft. CV53 ist damit individuell vom jeweiligen Motor abhängig. Ich habe die beiden Werte 30 und 33 gefunden. (Vorsicht! Die Geschwindigkeitskennlinie in CV67-CV94 existiert nicht bei ESU-Decodern, die das mfx-Digitalprotokoll verarbeiten!)
Mit den dargestellten Maßnahmen läuft's jetzt auch mit dem ESU-Decoder perfekt. Ich vermag nicht zu beurteilen, ob auch in der neuen 4er-Serie von ESU zwingend auf die alternative Geschwindigkeitskennlinie ausgewichen werden muss.
c) Uhlenbrock 76200
Der gehört hier eigentlich gar nicht hin, funktioniert aber trotzdem und das sogar wirklich sehr gut!
Dieser Decoder hat eigentlich separate Anschlüsse für den Kommutator (grün/blau) und die Statorspule (weiß/weiß) und ist nur für den begrenzten Strombedarf von H0-Loks ausgelegt. Ich habe mich nun bislang noch nicht getraut, die eigentlich zu niederohmigen Statorspulen von Spur0-Loks an die weißen Anschlüsse zu hängen. (Vielleicht verglüht der Decoder dabei sofort.) Die meisten kleineren Spur0-Loks haben aber in der Reihenschluss-Schaltung gar keine so hohe Stromaufnahme. Daher habe ich die Schaltung aus Bild 3 rechts einfach an die Anschlüsse grün/blau gehängt und weiß/weiß frei gelassen. Digitalisiert habe ich damit eine Märklin R 12890 und eine Buco 301.
Die Loks laufen auf Anhieb perfekt! Da der Decoder auf Allstrommotoren optimiert ist, sind alle Motorregelparameter von vornherein passend. Die Anpassung der Anfahrspannung ist auch einfach. Der Wert in CV56 (Skalierung der Motor-EMK-Spannung) ist auf 15 zu stellen. Dann lässt sich CV2 ganz leicht so einstellen, dass die Loks auf der niedrigsten Fahrstufe gerade noch weiterlaufen. Für beide Motoren ergeben sich da natürlich individuelle Werte.
Puh! - Die Abhandlung ist leider sehr lang geworden. Wer's bis ans Ende geschafft hat (wohl niemand!) und Nachbauinteresse hat (wohl erst recht niemand!), dem wünsche ich trotzdem auf jeden Fall viel Erfolg! ... Rückmeldungen sind natürlich willkommen! (Von wem???)
Viele Grüße
Thomas


 )
)






 ! Man kann sich dann allenfalls über die Konvention hinwegsetzen und Minus auf Mittelleiter als Vorwärtsfahrt für die Lok festlegen. Dann passt's.
! Man kann sich dann allenfalls über die Konvention hinwegsetzen und Minus auf Mittelleiter als Vorwärtsfahrt für die Lok festlegen. Dann passt's.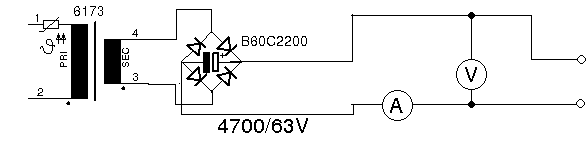 dieser Schaltung *alle* bislang getesteten Dekoder problemlos betreiben konnte, ohne daß mir merkwürdige Verhaltensweisen vorkamen. Getestete Dekoder sind: Lenz Gold mini, Zimo MX 620, 631C, 632C, 640C, Tams LD-G33/34, Esu Lopi 3 und 4, Uhlenbrock 76200 und 76420, Kuehn T-125 und 65 sowie Delta-Dekoder von Märklin ohne Systemerkennung auf Analog eingestellt. Die anderen Märklindekoder sind nicht DC-Kompatibel.
dieser Schaltung *alle* bislang getesteten Dekoder problemlos betreiben konnte, ohne daß mir merkwürdige Verhaltensweisen vorkamen. Getestete Dekoder sind: Lenz Gold mini, Zimo MX 620, 631C, 632C, 640C, Tams LD-G33/34, Esu Lopi 3 und 4, Uhlenbrock 76200 und 76420, Kuehn T-125 und 65 sowie Delta-Dekoder von Märklin ohne Systemerkennung auf Analog eingestellt. Die anderen Märklindekoder sind nicht DC-Kompatibel.

